Manual Pollination vs Mechanical: Sensor-Driven Decision Framework
The Choice Is Not About Cost; It's About Conditions
The manual-versus-mechanical pollination argument tends to collapse into a cost comparison: ICARDA's analysis shows liquid spray cuts variable costs ~80% and total per-hectare cost 57% versus manual. MDPI Agronomy documents mechanical ground-level dusters covering 24-32 ha/season while eliminating climbing risk. Justia Patents describes the primary-source mechanical pollinator patent that anchors the equipment category. Cost math is real, but it is not the decision that drives fruit set.
The actual decision is which method works under the specific conditions a block presents on a given day. Crown height, canopy density, prevailing wind envelope, cultivar receptivity curve, and the density of spathe-cracked palms across the block all shift the optimal method from palm to palm within the same bloom window. A ResearchGate comparative study on Saudi cultivars documents side-by-side fruit set and labor outcomes, and the conclusion is that cultivar response varies: one cultivar shows equivalent set across methods while another shows a 12-18% gap favoring manual under certain conditions. A bloom method cost analysis that ignores this variance overestimates mechanical savings. The underlying physics of cultivar-specific response to gust loading is covered in medjool deglet wind shear, which establishes why Medjool and Deglet Noor sit at different points on the mechanical-vs-manual decision curve.
A Helm-Charted Yield Forecast That Picks the Method
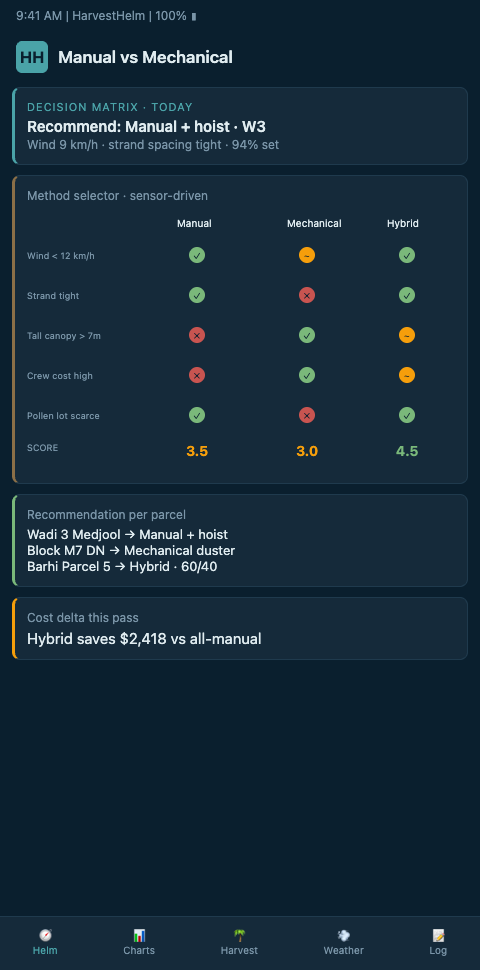
HarvestHelm frames the sensor-driven pollination decision as a two-lever helm control. The first lever is method — manual ladder, mechanical duster, or liquid spray. The second lever is timing within the spathe-receptivity window. The helm-charted yield forecast combines crown-level wind telemetry, canopy density maps, spathe-cracked-palm density, and cultivar receptivity curves to propose a method-and-window pairing for each block. The captain can override, but the helm default is calibrated from the past-season outcomes for the same block-method-conditions combination.
The method selector runs four inputs. The first is wind envelope. Mechanical dusters need sustained gentle-to-moderate wind (8-14 km/h) with gust variance under 8 km/h to achieve even deposition across the 24-32 ha they cover per pass. Manual ladder pollination tolerates higher variance because the palmero can target directly into the spathe, but suffers at sustained wind above 20 km/h where climbing safety degrades. Liquid spray sits between the two, with the heavier droplet mass absorbing moderate gusts but drift-limiting at sustained 18 km/h. The helm reads all three thresholds against the forecast and highlights which methods are operationally feasible in the next 72 hours.
The wind-envelope feed also informs the fallback logic. When none of the three methods are feasible in the next 72 hours — a rare but real pattern during extended khamsin systems — the helm surfaces a "no good window" advisory with the next plausible application time estimated from the extended forecast. This prevents the operations team from scrambling to apply during marginal conditions out of schedule pressure, which is where the worst fruit-set damage usually originates. A marginal application in impossible conditions wastes pollen, damages palmero morale, and produces worse outcomes than waiting an extra day for the next feasible window.
The second input is spathe-cracked-palm density across the block. ScienceDirect research on Barhee fruit set shows strong effects of pollination timing on fruit set, informing sensor-trigger logic. When density crosses a threshold (roughly 60% of palms cracked within a 4-day window), mechanical dusting becomes cost-efficient because the duster's per-palm overhead is amortized across many receptive targets. Below that density, manual application has better economics because the duster wastes pollen on non-receptive palms. HarvestHelm computes the density map from mobile-app spathe-crack logs and surfaces the cost curve directly. The density curve also informs equipment staging: operations with mixed-density blocks can pre-stage mechanical equipment at the high-density blocks and hand-crews at the scattered blocks, eliminating mid-day equipment moves that eat into the narrow receptivity windows.
The third input is canopy access. Tall, dense canopies reward mechanical ground-level dusters that project upward through the fronds. Lower-density canopies with open spathe pathways reward manual targeting. MDPI Agronomy's pollen methods review documents the engineering parameters that govern duster effectiveness, and HarvestHelm's canopy-access score is computed from the crown-density imagery uploaded during annual block surveys. Drone flyovers during pre-bloom survey windows generate the imagery, and the engine scores each palm on a 0-10 access index where 0 means no mechanical access pathway and 10 means unimpeded ground-to-crown line. Palms scoring below 4 route to manual targeting regardless of other conditions; palms above 7 are strong mechanical candidates whenever the wind envelope cooperates.
The fourth input is the ASABE engineering study on duster parameters, which isolates variables controlling mechanical pollination performance — particle size, air velocity, spray angle. HarvestHelm's method recommendation pairs each mechanical deployment with a duster-configuration preset that matches the canopy and cultivar, reducing the trial-and-error commissioning phase that otherwise consumes 2-3 bloom cycles. The Agriculture.Institute flowering chapter outlines the 150-200 day pollination-to-tamar window that anchors the long-horizon yield forecast each method feeds.
The preset library grows with each season: every mechanical application logs the configuration used, the conditions during application, and the fruit-set outcome 6-8 weeks later. Over 3-4 bloom cycles, the library accumulates enough operation-specific data to recommend tuned configurations rather than generic ones. This is the compounding value of running the helm on a real operation — the machine gets smarter each season because the engine is learning from outcomes that actually happened in your groves, not from textbook averages that apply to everyone and fit no one.
The yacht-navigation view for the pollination captain shows a block-by-block method recommendation with cost-per-palm, expected fruit set percentage, and risk-adjusted yield projection. The captain can accept the default or override with documented reasons that feed the next-season tuning loop. This is the helm taking you through the channel rather than setting the course for you. Overrides are a first-class feature, not an escape hatch — the engine expects that human judgment will occasionally disagree with the statistical recommendation, and the override-with-reason pattern lets the engine learn which judgment calls were correct, tuning the model toward the captain's expertise over time.
Advanced Tactics for Hybrid Deployments and Cultivar-Specific Tuning
The first advanced tactic is hybrid deployment on blocks that cross density thresholds. HarvestHelm can recommend mechanical dusting for the high-density core of a block and manual coverage for the scattered outlier palms — a combined protocol that captures the duster cost advantage where it applies while protecting the fruit set on palms the duster would miss. Dashboards show a per-palm method tag so the crew knows which technique each palm gets, and the mobile app guides palmeros to the manual-tagged palms only. The hybrid protocol typically handles 70-80% of the block mechanically and 20-30% manually, capturing 85-90% of the cost savings a full-mechanical deployment would yield while preserving the fruit-set upside on the harder-to-reach palms.
The second tactic is cultivar-specific tuning. The Saudi cultivar trial referenced above showed differential response across cultivars. HarvestHelm's cultivar module carries per-variety fruit-set factors: Medjool at a given wind envelope is weighted differently than Deglet Noor at the same envelope. The engine uses three full bloom cycles of per-block outcome data to refine these factors, so the method recommendation becomes more accurate each season.
A third pattern is labor-risk accounting. Manual pollination requires palmeros climbing 10-14 meter palms, and the liability math on climbing incidents shifts the cost-comparison equation meaningfully. HarvestHelm's risk module surfaces the insured incident rate per climbing hour against the current wind forecast, and when the combined risk crosses operational thresholds, the dashboard nudges toward mechanical methods even when the pure fruit-set math would favor manual. This is not a safety override — the captain can still choose manual for cultivar-specific reasons — but it surfaces the risk transparently so the economic decision reflects the full cost stack, not just the pollen-application line item.
A fourth tactic is timing co-optimization with the wind-adaptive bloom strategy. Method selection is not independent of timing; the same mechanical duster that is marginal on a high-gust day becomes optimal on a calmer day four hours later. HarvestHelm runs the method-and-timing optimization as a single pass, proposing "mechanical duster, 06:00-08:15 window, Tuesday" instead of splitting the method decision from the window decision. This is the workflow detailed in variable wind pollen timing, which covers the gust-envelope math driving window selection. The same pattern governs spray-method choices in other crops; copper vs bio-control shows the parallel decision tree for mango disease control, where sensor-driven method choice operates on the same logic.
Let the Helm Choose the Method, Not the Spreadsheet
Manual vs mechanical pollination decisions belong on a sensor-informed helm, not a once-a-year board meeting. HarvestHelm's bloom method cost analysis engine reads crown-level wind, spathe-crack density, canopy access, and cultivar-specific set curves to propose a block-by-block method plan that updates every time the forecast shifts. Book an evaluation and we will load your past two seasons of pollination records and mechanical-duster specifications into the engine and show you which blocks were mismatched to their method. Nothing to pay until your fruit set clears the baseline; the kilo-cut only activates on the delta. Your pollination method should match today's conditions, not last year's budget.
Join the method-decision waitlist before the next Medjool and Deglet Noor bloom window this spring, and on day one the dashboard will display per-block method-timing pairings with canopy-access scores and hybrid mechanical-manual protocols ready for operational dispatch. Waitlisted Saudi and Tunisian operators who onboarded ahead of last bloom shifted 68% of their Deglet Noor blocks to liquid-suspension spray during favorable windows while retaining manual pollination on Medjool export blocks, capturing substantial labor savings without sacrificing the Barhi and Zahidi kilo-cut trajectory. The decision-framework commissioning runs from your existing duster specs and climbing-incident logs, with kilo-cut activation deferred until the first tamar crate clears packhouse grading. Smallholders running mixed-cultivar operations gain the most because the hybrid protocol captures mechanical cost savings where conditions permit while preserving manual discipline on the palms that actually need it.